About The project
What is RĔGO?
RĔGO is a 4-years research project funded by the European Commission under the Horizon Europe programme. It aims to develop an innovative set of AI-powered, microsized, untethered, stimuli-responsive swarms of robots. They will be wirelessly steered through electromagnetic fields as well as respond to other external stimuli, jointly controlled by humans through intuitive multisensory interfaces and by autonomous controllers through AI-based cognitive algorithms. They will be carried and intelligently deployed by a set of similar AI-powered, milli-sized, untethered, stimuli-responsive robotic carriers, able to dispatch the microsized robotic swarm and to locally steer/activate it for improved multi-robot control at the micro-scale. Similarly to ants and multi-drone systems, the RĔGO robots will be able to team up and collaborate to fulfil highly complex tasks in a robust, scalable, and flexible way.
Objectives
Objective 1.
endow small-scale robots of stimuli-responsive and multi-robot collaboration capabilities, taking advantage from the outstanding properties of new smart materials and the capabilities of cutting-edge fabrication technologies.
Objective 2.
enable precise, safe, independent, and repeatable autonomous control of multiple wireless robots through distributed electromagnetic fields and other relevant external stimuli.
Objective 3.
enable intuitive and trustworthy human control of the multi-robot small-scale system via innovative cognitive-based interfaces and interaction techniques, exploiting multisensory feedback and AI-powered shared control.
Objective 4.
demonstrate and validate the benefits of the proposed robotic technologies in four representative high-impact scenarios for the medical, assembly, and environmental fields.
Objective 5.
disseminate the project’s result and advocate for the applicability of the developed robotic core technologies for and beyond the use cases considered
Workplan
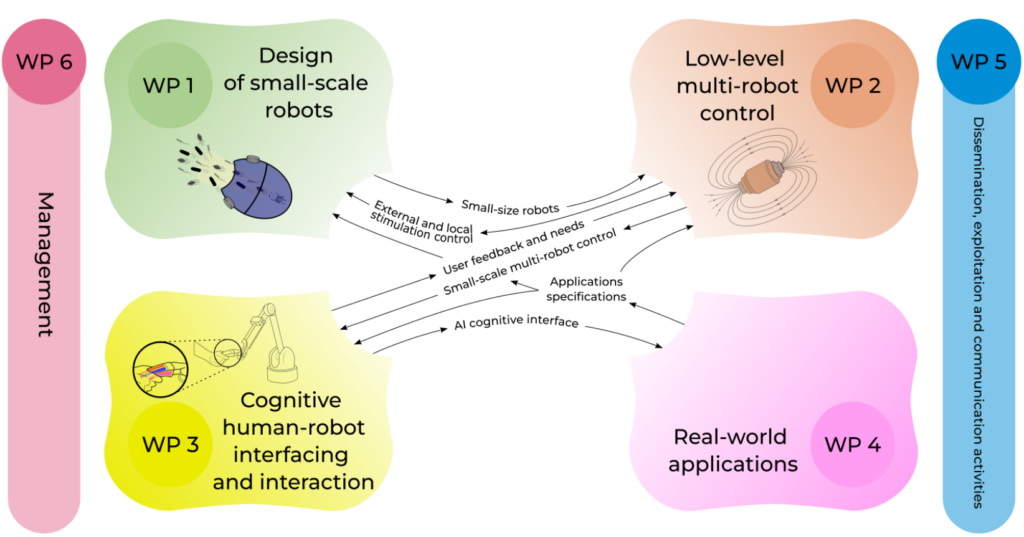
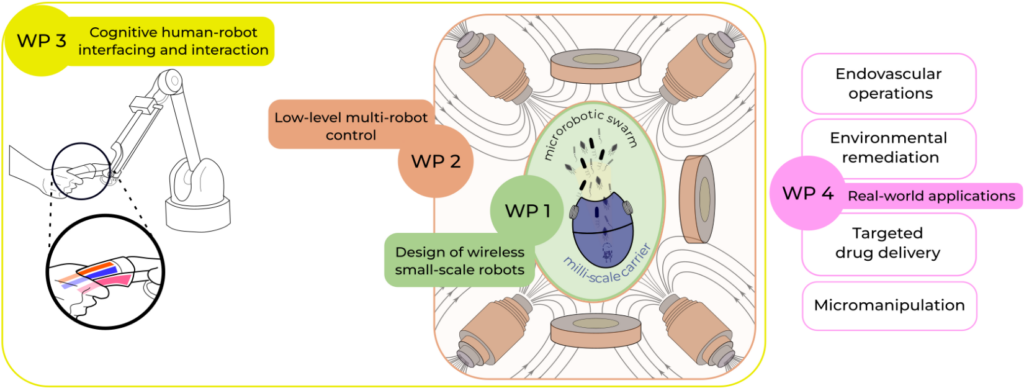
RĔGO’s work plan is divided into six Work Packages (WPs),
WP1
advances AI-inspired technologies and methodologies for endowing robots with stimuli-responsiveness and multi-robot coordination capabilities, making use of innovative materials and fabrication techniques.
WP2
studies and develops efficient control hardware as well as principled AI theoretical frameworks to precisely and safely control multi-robot small-size systems through external stimulation.
WP3
designs principled AI-powered frameworks for the control of the RĔGO system by human operators, attaining a natural interface able to provide intuitive means to steer the system and designing associated interaction techniques.
WP4
designs and evaluates the RĔGO techniques in four high-impact representative application scenarios, following an iterative and user-centered design approach.
WP5
maximizes the impact of our results in public, science, technology, industry and policy events, as well as human-computer integration through intuitive interfaces, natural control techniques, and new materials.
WP6
coordinate and lead the decision-making, data management, IPR policies, working relations, and collaborations within the project.